
Программа управления ЧПУ на Ардуино для Windows
Для запуска eCNC v3 необходимо устнаовить следующее ПО
1. Java Runtime Environment
Для работы приложения необходимо установить Java Runtime Environment.
Актуальная версия доступна по ссылке https://www.java.com/ru/download/
2. Программа eCNC v3
Актуальная версия ПО: 3.0.48 от 13.05.2025
Скачать eCNC v3 (jar, 1.6 Mb)
3. Драйвер для подключения Ардуино к ПК
Драйвер подходит для 32/64 разрядных ОС Windoows.
Скачать драйвер (zip, 130 Kb)
4. Прошивка для Arduino
Программа eCNC v3 работает с прошивкой Grbl 1.1h.
На Arduino Nano и Arduino Uno прошивку Grbl 1.1h можно установить из программы eCNC v3, выбрав в главном меню Настройки -> Прошивка.
На другие контроллеры прошивку Grbl 1.1h придется загружать самостоятельно, используя подходящие системы и IDE, рекомендуемые их производителями.
Ссылка на актуальную версию GRBL
Последние изменения eCNC v3
| Версия eCNC v3 | Совместимая прошивка | Дата релиза | Доработки/изменения |
|---|---|---|---|
| 3.0.48 | Grbl 1.1h | 13.05.2025 | Доработаны элементы управления обработкой на всех рабочих формах |
| 3.0.44 | Grbl 1.1h | 28.04.2025 | Форма лазерной резки. Мощность лазера привязана к изображению |
| 3.0.43 | Grbl 1.1h | 24.04.2025 | Форма лазерной резки. Доработана установка мощности лазера |
| 3.0.41 | Grbl 1.1h | 22.04.2025 | Форма лазерной резки. Сделана отрисовка траектории резки |
| 3.0.40 | Grbl 1.1h | 19.04.2025 | Изменен алгоритм лазерной резки. Резка всех фигур производится поочередно |
| 3.0.38 | Grbl 1.1h | 18.04.2025 | При первом запуске в папке программы создается ярлык «eCNC v3» для удобного размещения |
| 3.0.37 | Grbl 1.1h | 17.04.2025 | Улучшено качество преобразования произвольного рисунка в векторное изображение |
| 3.0.36 | Grbl 1.1h | 24.03.2025 | Доработки формы преобразования произвольного рисунка в векторное изображение |
| 3.0.35 | Grbl 1.1h | 22.03.2025 | Добавлена форма преобразования произвольного рисунка в векторное изображение |
| 3.0.34 | Grbl 1.1h | 20.03.2025 | Форма лазерной резки. Исправлена ошибка ввода мощности |
Подробнее
Приветствую, у меня вылазит иногда проблема:
Собрал выжигатель из шаговых двигателей старых принтеров и ардуины, но иногда grbl в ардуине начинает по своему глючить
1. загружаю файл cnc в jcnc,
2. Жму старт,
3. Шпиндель доходит до места начала прожига, включает шпиндель, ненадолго зависает и потом как-будто начинает выполнять только-что выполненную команду — т.е. двигается дальше, хотя иногда в cnc файле таких координат и близко нету, они тупо меньше.
Особенно часто бывает, когда выжигаешь крупную картинку и случайно по какой-либо причине процесса выжигания прервался. После «выпиливания» части cnc-кода, которая уже выжглась, и установки шпинделя в нулевое положение, делаешь ресет ардуины, запускаешь станок и он сам же перечеркивает свою работу
Лечится иногда ресетом компьютера, иногда в cnc-коде меняю G00 на G01 или обратно, переподключением USB-кабеля и ардуины и пр. В общем танцы с бубном и без бутылки не разобраться Косяк конечно не смертельный, но психуешь отчаянно
berkut229 писал(а):Всем привет. Столкнулся с проблемой при использовании GRBL. Суть в чем. Подготавливаю файл в CHPU конвертере небольшого размера примерно шириной 100 и высотой 200мм, закидываю в GRBL, все работает нормально. Если делаю файл уже шириной более 200мм, то GRBL не успевает отправлять команды за станком. И станок работает с паузами через каждые 3-5см пути. Эту проблему можно как то решить? Прошивка в ардуино 0.8 версии, видел 0.9 версию, может с ней лучше будет. Или может другой софт попробовать?
Лечил сменой прошивки со скоростью 9600 на 112000 и то данный косяк не изжил себя — задержка имеет место быть, но не так явно 300мм редко когда за 1 сек, но визуально концы линий пригорают (синий лазер 2Вт )
П.С.: Такая проблема была у меня при использовании прошивок grbl на скорости СОМ порта 9600, обычно это было так: если при выжигании длина линии к примеру 10мм — все ок, задержки не ощущались, но если длина линии за 100 мм уже появлялись довольно заметные задержки (по наблюдениям на 200 мм — задержка до 10-15 сек) , что конечно оставляла жирную черную точку портя товарный вид изделия
П.П.С.: В связи с описанными мной выше проблемам достаточно много перепробовал прошивок grbl, официальные у меня толково шли только до 0.8с (скорость 9600), выше 0.9 обычно или круги не рисовал или еще чего-то не шло. Поэтому вроде брал с параллельной ветки прошивку, сейчас не дома, но если надо могу посмотреть где скачал толковую на скорость 112000.
Если вы интересуетесь темой станков с ЧПУ (числовым программным управлением), то рано или поздно вы встретитесь с термином GRBL. В данной статье мы узнаем, что такое GRBL, как установить и как использовать его для управления станком с ЧПУ на базе платы Arduino. Кроме того, мы узнаем, как использовать Universal G-code Sender, популярное программное обеспечение контроллера GRBL с открытым исходным кодом.

В рассмотренной ранее на нашем сайте статье про плоттер с ЧПУ на основе платы Arduino мы также использовали контроллер GRBL.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- Драйвер шагового двигателя A4988 (купить на AliExpress).
- Шаговый двигатель NEMA 17 (купить на AliExpress).
- Arduino CNC Shield.
Реклама: ООО «АЛИБАБА.КОМ (РУ)» ИНН: 7703380158
Для установки GRBL нам понадобится плата Arduino. В частности, нам нужна будет плата Arduino на базе микрокон Atmega 328, а это означает, что мы можем использовать либо Arduino UNO, либо Nano. Шаговые двигатели будут обеспечивать движение исполнительного механизма.
Для управления шаговыми двигателями нам нужны драйверы, а для небольших станков с ЧПУ «сделай сам» (использующих шаговые двигатели NEMA 14 или 17) чаще всего выбирают драйверы A4988 или DRV8825.
Для подключения драйверов шаговых двигателей к плате Arduino проще всего использовать плату расширения Arduino CNC Shield. Она использует все контакты Arduino и обеспечивает простой способ подключения всего: шаговых двигателей, шпинделя/лазера, концевых выключателей, охлаждающего вентилятора и т. д.
Обратите внимание, что это только основные электронные компоненты, которые нам нужны, чтобы понять, как работает станок с ЧПУ, для реального станка будут нужны дополнительные компоненты.
GRBL — это программное обеспечение или прошивка с открытым исходным кодом, которая обеспечивает управление движением для станков с ЧПУ. Можно легко установить прошивку GRBL на плату Arduino и мгновенно получить недорогой высокопроизводительный контроллер ЧПУ. GRBL использует G-код в качестве входных данных и выводит управление движением через Arduino. Основные принципы написания G-кода мы рассматривали в этой статье.
Более наглядно все эти процессы продемонстрированы на следующем рисунке.

Из представленного рисунка видно какое место занимает GRBL в «общей картине» принципа работы станка с ЧПУ. По сути, это прошивка, которую нам нужно установить или загрузить в плату Arduino, чтобы она могла управлять шаговыми двигателями станка с ЧПУ. Другими словами, функция прошивки GRBL заключается в преобразовании G-кода в движения двигателя.
Схема проекта
Схема станка с ЧПУ на основе платы Arduino и контроллера GRBL показана на следующем рисунке.

В качестве примера подобного станка можно посмотреть на примере станка для резки пенопласта с ЧПУ своими руками. Основным инструментом этого станка с ЧПУ является горячая проволока, которая может легко расплавить или прорезать пенопласт и придать ему любую форму. Внешний вид этого станка показан на следующем рисунке.

На протяжении данной статьи мы будем использовать этот станок в качестве примера потому что тот же принцип работы применим и к любому другому станку с ЧПУ, будь то фрезерный или лазерный.
Как установить GRBL
Во-первых, чтобы иметь возможность установить или загрузить GRBL в Arduino, нам будет нужна Arduino IDE .
Затем мы можем скачать прошивку GRBL с github.com.

Загрузите его как файл .ZIP, а затем выполните следующие действия:
- Откройте файл grbl-master.zip и извлеките файлы
- Откройте среду разработки Arduino IDE, в ней выберите пункт меню Sketch > Include Library > Add .ZIP Library…

- Перейдите к извлеченной папке «grbl-master», выберите там папку «grbl» и нажмите «Открыть файл». Теперь нам нужно использовать GRBL как библиотеку Arduino.

- Затем выберите пункт меню File > Examples > grbl > grblUpload. Откроется новый скетч, и нам нужно загрузить его в плату Arduino. Код может выглядеть странно, так как состоит всего из одной строки, но не беспокойтесь, все происходит в фоновом режиме в библиотеке. Итак, нам просто нужно выбрать плату Arduino, корректный COM-порт и нажать кнопку загрузки, и все готово.
Конфигурация GRBL
На этом этапе мы должны настроить или настроить GRBL для нашей машины. Мы можем сделать это через последовательный монитор Arduino IDE. Как только мы откроем Serial Monitor, мы получим сообщение вроде «Grbl 1.1h [‘$’ for help]». Если вы не видите это сообщение, убедитесь, что вы изменили скорость передачи данных на 115200.
Если мы введем «$$», мы получим список команд или текущих настроек, и они выглядят примерно так:
$100=250.000 (x, step/mm)
$101=250.000 (y, step/mm)
$102=3200.000 (z, step/mm)
$110=500.000 (x max rate, mm/min)
$111=500.000 (y max rate, mm/min)
$112=500.000 (z max rate, mm/min)
$120=10.000 (x accel, mm/sec^2)
$121=10.000 (y accel, mm/sec^2)
$122=10.000 (z accel, mm/sec^2)
Все эти команды могут быть или должны быть скорректированы в соответствии с нашим станком с ЧПУ. Например, с помощью первой команды $100=250 000 (x, шаг/мм) мы можем настроить количество шагов на миллиметр станка или указать, сколько шагов должен сделать двигатель, чтобы наша ось X переместилась на 1 мм.
Тем не менее, я бы предложил оставить эти настройки как есть. Есть более простой способ настроить их в соответствии с нашей машиной с помощью программного обеспечения контроллера, о котором мы расскажем в следующем разделе.
GRBL-контроллер
Итак, после того, как мы установили прошивку GRBL, наша плата Arduino будет способна читать G-код и управлять станком с ЧПУ в соответствии с ним. Однако для того, чтобы отправить G-код на Arduino, нам нужен какой-то интерфейс или программное обеспечение контроллера, которое скажет Arduino, что делать. На самом деле для этой цели существует множество как открытых, так и коммерческих программ. Конечно, мы будем придерживаться открытого исходного кода, поэтому в качестве примера будем использовать Universal G-code Sender .

Как использовать Universal G-code Sender
В этом примере мы будем использовать версию платформы 2.0. Как только мы загрузим его, нам нужно распаковать zip-файл, перейти в папку «bin» и открыть любой из исполняемых файлов «ugsplatfrom». На самом деле это программа JAVA, поэтому, чтобы иметь возможность запускать эту программу, сначала нам нужно установить JAVA Runtime Environment .
После того, как мы откроем Universal G-code Sender, сначала нам нужно настроить машину или настроить параметры GRBL, показанные ранее. Для этого мы воспользуемся мастером настройки UGS, который гораздо удобнее, чем вводить команды вручную через Serial Monitor в Arduino IDE.

Первым шагом здесь является выбор скорости передачи данных, которая должна быть 115200 бод, и порта, к которому подключена наша плата Arduino. Как только мы подключим Universal G-code Sender к Arduino, на следующем шаге мы сможем проверить направление движения двигателей.

При необходимости мы можем изменить направление с помощью мастера или вручную переключив соединение двигателя на Arduino CNC Shield.
На следующем шаге мы можем настроить параметр шагов/мм, о котором мы упоминали ранее. Здесь гораздо проще понять, как его настроить, потому что мастер настройки рассчитает и подскажет, до какого значения нам следует обновить данный параметр.

Значение по умолчанию — 250 шагов/мм. Это означает, что если мы нажмем кнопку перемещения «х+», мотор сделает 250 шагов. Теперь, в зависимости от количества физических шагов двигателя, выбранного шагового разрешения и типа трансмиссии, машина будет перемещаться на некоторое расстояние. Используя линейку, мы можем измерить фактическое движение машины и ввести это значение в поле «Фактическое движение». На основании этого мастер рассчитает и сообщит нам, на какое значение следует изменить параметр «шаги/мм».

В рассматриваемом случае для самодельного станка с ЧПУ станок сдвинулся на 3 мм. В соответствии с этим мастер предложил обновить параметр «шаги/мм» до значения 83.

После обновления этого значения станок теперь движется правильно, 1 мм в программном обеспечении означает 1 мм для станка с ЧПУ.
В консоли UGS, когда мы делаем каждое действие, мы можем видеть выполняемые команды. Мы можем заметить, что, обновляя параметр steps/mm, программа UGS фактически отправляла в Arduino или прошивку GRBL команду, которую мы упоминали ранее. Это было значение по умолчанию: $100=250.000 (x, step/mm), и теперь мы обновили значение до 83 шагов на мм: $100=83.
На следующем шаге мы можем включить концевые выключатели и проверить правильно ли они работают.

В зависимости от того, являются ли они нормально открытыми или нормально закрытыми, мы также можем инвертировать их здесь.
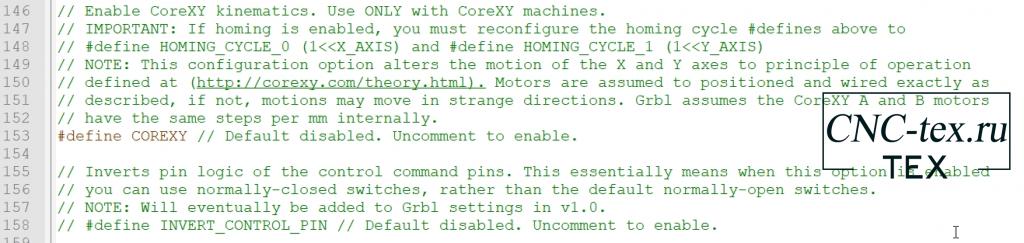
Здесь стоит отметить, что иногда нам нужно отключить концевой выключатель оси Z. Так было с рассматриваемым самодельным станком для резки пенопласта с ЧПУ, где был не нужен концевой выключатель оси Z, и его пришлось отключить чтобы иметь возможность правильно установить станок в исходное положение. Итак, для этого нам нужно отредактировать файл config.h, который находится в папке библиотеки Arduino (или Documents\Arduino\libraries).

Здесь нам нужно найти линии цикла возврата в исходное положение и закомментировать набор по умолчанию для 3-осевого станка с ЧПУ и раскомментировать настройку для 2-осевого станка. Чтобы изменения вступили в силу, нам нужно сохранить файл и повторно загрузить скетч grblUpload в нашу плату Arduino.
Тем не менее, на следующем шаге мы можем либо включить, либо отключить самонаведение ЧПУ.

С помощью кнопки «Try homing» машина начнет движение к концевым выключателям. В случае, если это идет в противоположном направлении, мы можем легко изменить направление.
Наконец, на последнем шаге мастера настройки мы можем включить мягкие ограничения для нашего станка с ЧПУ.

Мягкие ограничения предотвращают выход машины за пределы установленной рабочей зоны.
Заключение
Итак, благодаря прошивке GRBL и плате Arduino мы можем легко настроить и запустить наш самодельный станок с ЧПУ. Конечно, в этой статье мы рассмотрели только основы этих процессов, но я думаю, что этого было достаточно, чтобы понять, как все работает и как настроить и запустить наш первый станок с ЧПУ.

Конечно, доступно множество других настроек и функций, так как GRBL действительно поддерживает прошивку контроллера ЧПУ. Документация GRBL подробно объясняет все это, поэтому вы всегда можете проверить их на их вики-странице на github.com .
Кроме того, существует множество других программ контроллера GRBL с открытым исходным кодом, таких как Universal G-code Sender, и вот некоторые из них: GRBLweb (веб-браузер), GrblPanel (графический интерфейс Windows), grblControl (графический интерфейс Windows/Linux), Easel (на основе браузера) и т. д. Вы можете изучить их и выбрать из них наиболее подходящий для себя.
Источник статьи
Загрузка…
7 283 просмотров
CNCLib / CNCStepper
Build your own CNC machine/laser with CNCLib and CNCStepper.
Both projects are on github.
https://github.com/aiten/CNCLib
https://github.com/aiten/CNCStepper
CNCLib
CNCLib is a Windows and Web application.
The web application is hosted here: https://cnclib.azurewebsites.net
Define and configure your own machine
- USB Port
- Axis count and size
- Probe definition
- Initial commands
- Custom commands
Control your machine
- Send commands (gcode)
- Move axis
- Define zero-shift
- Read/Write SD
- Define rotations
- Configure CNC machine by writing to the Eeprom
- Watch command history
Preview of CNC program
- Scroll
- Zoom in and out
- Rotate
- Define colors for machine, laser, mill, …

Import GCode
- Import as it is
- Add linenumbers
- Convert e.g. g82 (drill command) because your machine does not support the command
Import HPGL
- Import HPGL with «Resize» and «Move»
- Option for «grave» => the CNC program will follow the line
- Option for «cut» => the CNC program is created with an offset (laser-size or mill diameter)

Import Image
- Import Image — for laser
- Dither

Image — for cut holes
- Differnet hole shapes (diamond, heard, circle, …)


With this import option a CNC program is created to cut holes into e.g. a paper. The width of the holes are calculated from the image depending on the brightness.
Собрал я себе новый плоттер с большой скоростью обработки и с большим рабочим полем. Ознакомиться с этапами сборки и скачать исходные материалы можете в предыдущей статье. Все файлы располагаются внизу статьи в разделе «Файлы для скачивания». После сборки я нарисовал фломастером пару рисунков. Сейчас решил нарисовать что-нибудь ручкой. С этим есть свои сложности, но об этом расскажу в конце статьи. А сейчас рассмотрим, какими программами пользовался и как рисовал из векторного и растрового изображения. И посмотрим результат моих экспериментов.
Хотел бы узнать интересно ли вам два вопроса и стоит ли писать про них писать статьи:
- Нужна полная инструкция по прошивке и настройке плоттера 4xiDraw? Это плоттер, который буду использовать для создания рисунков для данной статьи.
- Нужно ли подробнее разобрать написание текста на плеторе?
Какие программы понадобиться для рисования на ЧПУ плоттере 4xiDraw.
Для того чтобы работать с векторной графикой использую бесплатную программу Inkscape, про которую вкратце рассказывал тут.
Для управления ЧПУ плоттером нам понадобиться программа LaserGRBL, про которую у меня подробно написано тут. Также данная программа помогает делать G-Code из векторных и растровых изображений. О чем расскажу немного позднее.
Также буду использовать веб приложение под названием Plotterfun, которое поможет сделать из обычного скучного изображения разнообразные векторные рисунки с заштриховкой, в виде карандашного рисунка, из точек, зигзагов и пр. Как пользоваться веб приложением Plotterfun подробно рассказываю вот в этой статье.
Нам понадобятся следующие программы для ЧПУ плоттера на Artduino:
- Inkscape
- LaserGRBL
- Plotterfun
Рисуем векторное изображение на плоттере 4xiDraw.
Для того чтобы нарисовать векторное изображение на плоттере 4xiDraw. Для начала нам нужно само векторное изображение. Если вы можете самостоятельно сделать векторное изображение это просто замечательно. А если у вас нет навыков, но проверить работоспособность плоттера охота. То можно скачать изображение с сайта plotterfiles.com. На нем нужно зарегистрироваться и скачать понравившееся изображение. Я скачал вот эти изображения, которые впоследствии нарисовал.
Как создать G-Code для плоттера 4xiDraw из векторной графики.
Если вы интересовались, как создать G-Code для плоттера 4xiDraw из векторной графики. Скорее всего, вы нашли кучу информации по использованию дополнительных плагинов для программы Inkscape. Но вот незадача плагины работают на определённой версии Inkscape. И чтобы его настроить, нужно произвести соответствующие настройки. Я же использую программу LaserGRBL. Которая отлично рисует из векторной графики и нам не нужно задумываться о процессе создания G-Code. Но тут есть свои особенности. Для работы с LaserGRBL с рисующим плоттером нужно сделать настройки прошивки. Вам ничего настраивать не нужно, прошивка со всеми необходимыми настройками есть у меня на сайте, и вы можете её скачать вот в этой статье.
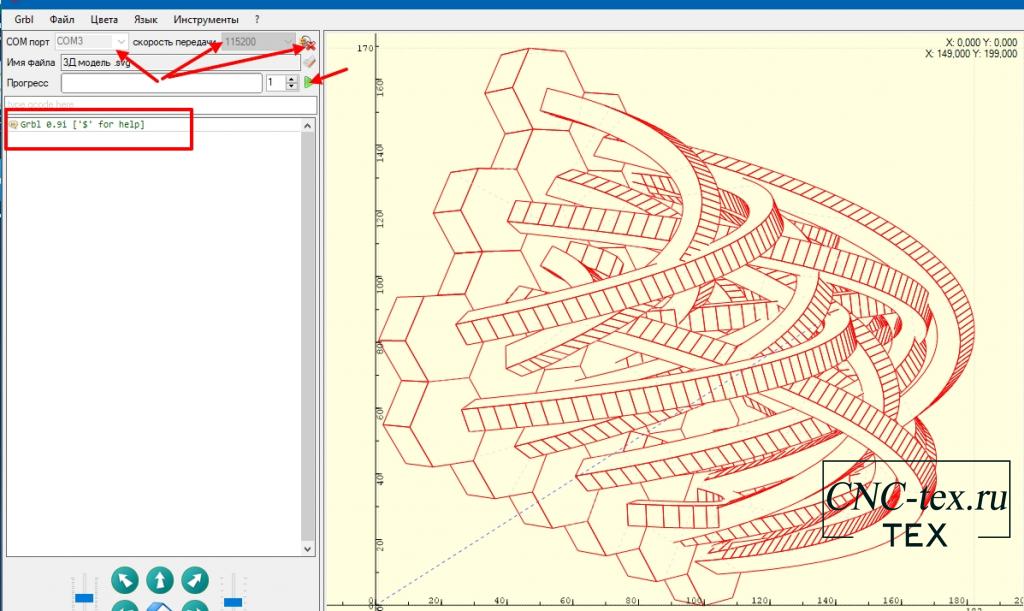
Чтобы начать рисовать выбираем в программе LaserGRBL нужный файл.
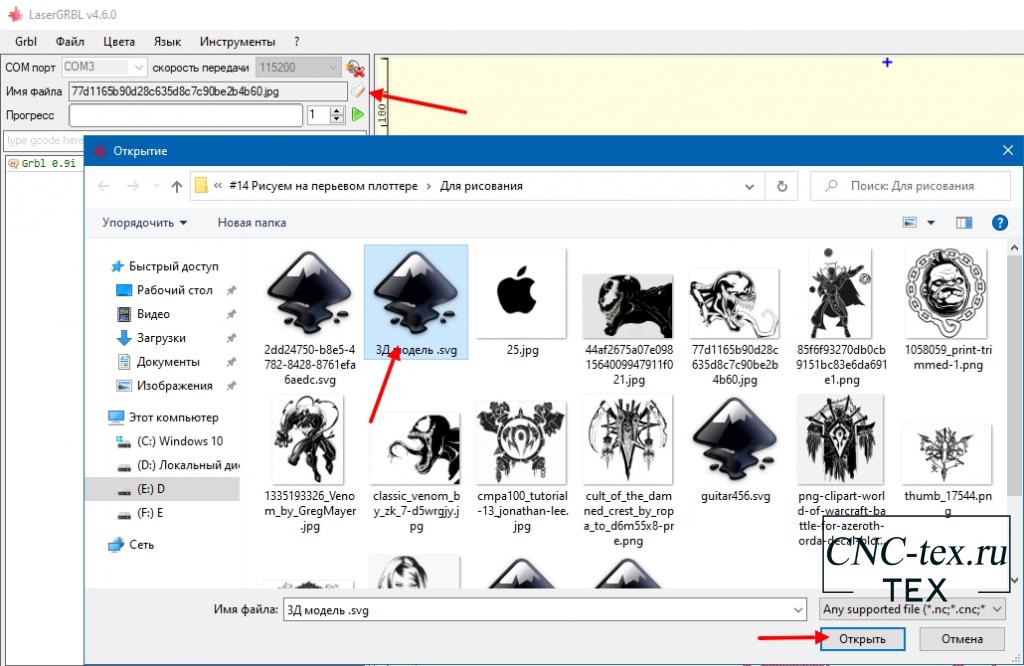
Производим нужные настройки. У вашего плоттера настройки могут быть другими. Но сильно отличаться они не должны.
Например, для рисования фломастером я использовал диапазон:
- S-мин. 0 – Положение серво, когда происходит перемещение.
- S-макс. 15 – Производим рисование, маркер отпущен.
Для ручки я использую немного другой диапазон перемещения:
- S-мин. 0 – Положение серво, когда происходит перемещение.
- S-макс. 25 – Производим рисование, маркер отпущен.
Это связанно с тем, что пришлось немного модифицировать ручку для того чтобы прижим был одинаковый. Но об этом расскажу в конце статьи.
Сейчас можно нажать на кнопку пуск и подождать пока плоттер все нарисует.
Получить можем вот такой результат.
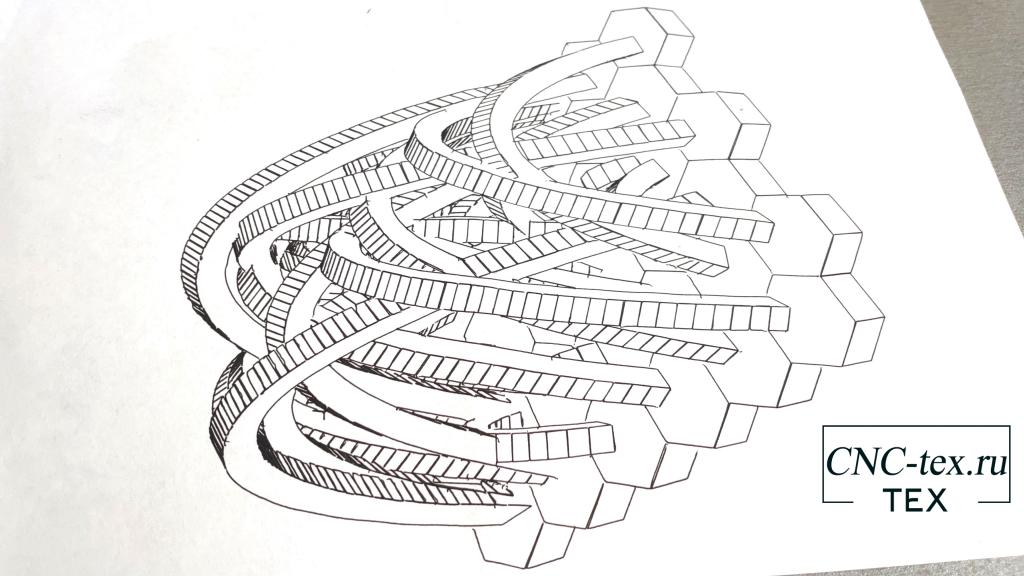
Или такой.

Рисуем растровый рисунок на Arduino плоттере 4xiDraw.
Сегодня расскажу 2 способа, как можно нарисовать растровое изображение на Arduino плоттере 4xiDraw. Первый способ преобразует растровое изображение в векторное с различными эффектами. С этим поможет веб приложение Plotterfun, которое как раз преобразует растровое в векторное изображение.
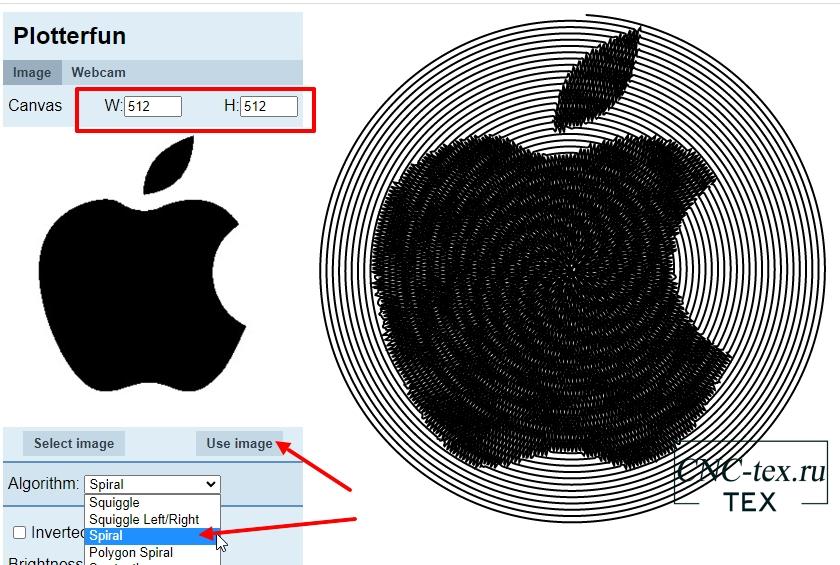
Берём любую картинку, например логотип компании Apple и преобразуем в спиральное изображение и получаем вот такое векторную картинку. И рисуем его как обычное векторное изображение. Получается вот такой рисунок.

Правда, изображение получилось перевернутое по вертикали. Почему так получилось, расскажу в конце статьи.
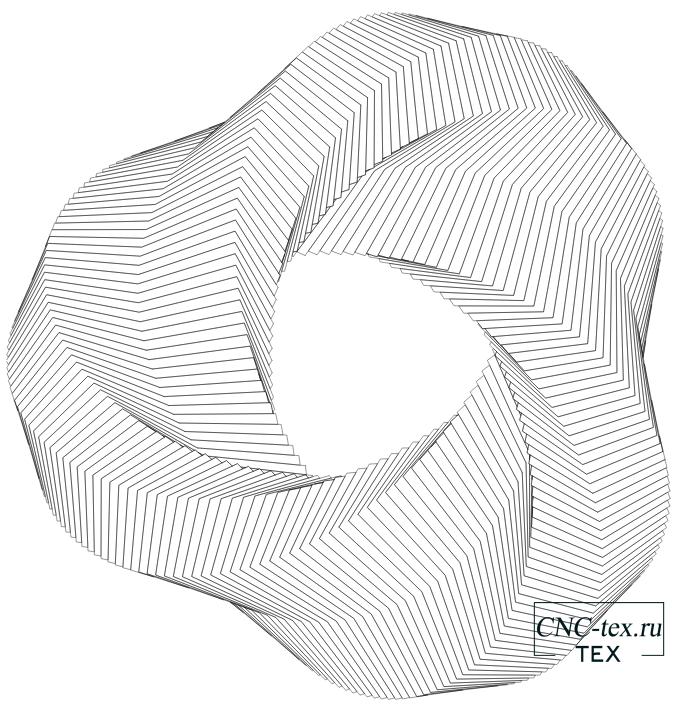
Также можно нарисовать более сложное изображение, например, берем картинку девушки и преобразуем ее в изображение, которое рисуется одной линией без отрыва.
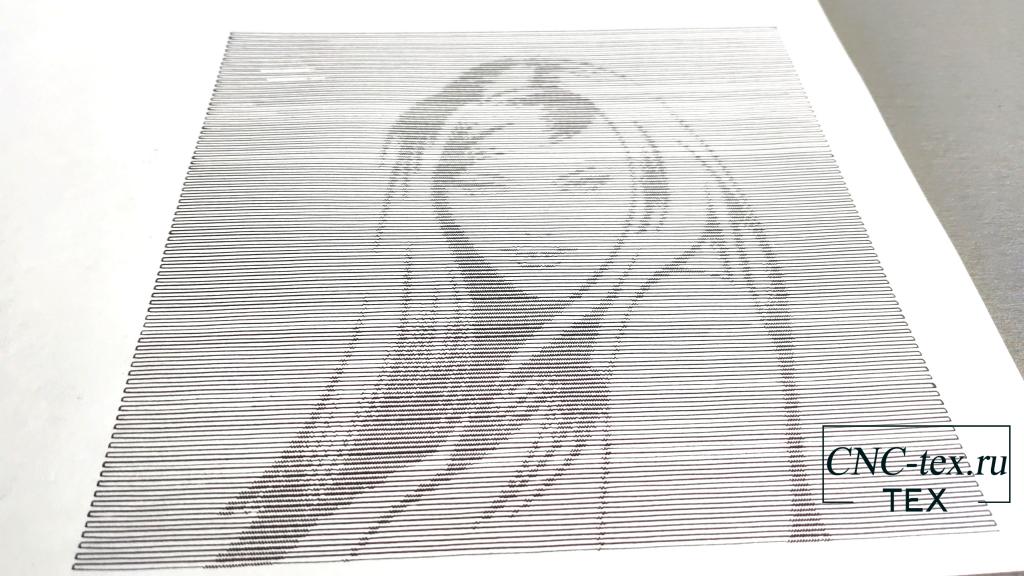
Плоттер рисует его достаточно быстро и получается вот такой результат. Но получилось немного блекло, это связанно с тем, что заканчивалась паста в ручке.
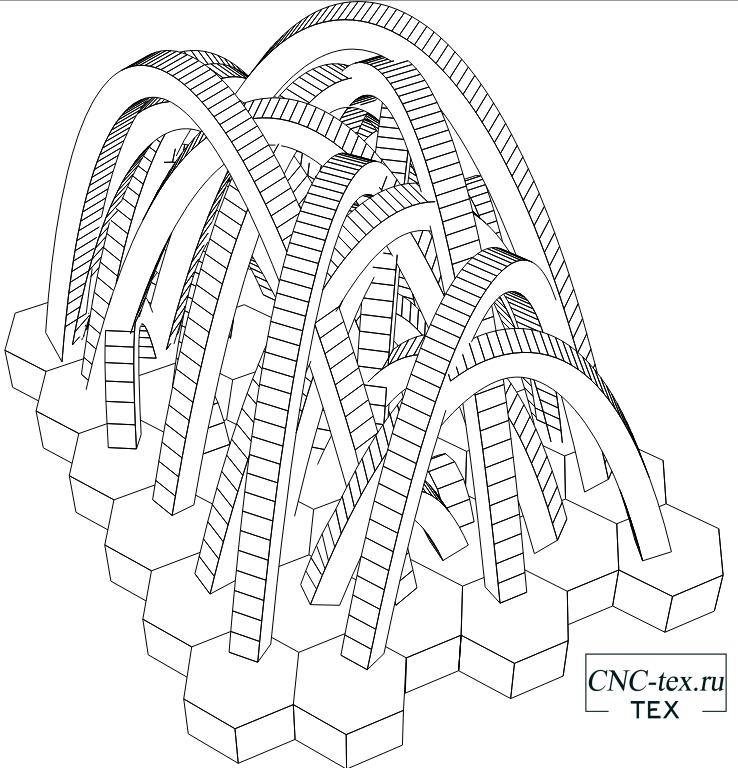
Второй способ заключается в преобразовании растрового изображения с помощью программы LaserGRBL. Используя всего одну программу, получаем нужное векторное изображение с различным способом заштриховки. Которое отправляем на печать.
Исходная картинка выглядит вот так
Преобразованная картинка и готовая для рисования так.
Плоттер на Arduino нарисовал вот такой результат. Неплохо с учетом того, что все сделано нажатием нескольких клавиш в одной программе.
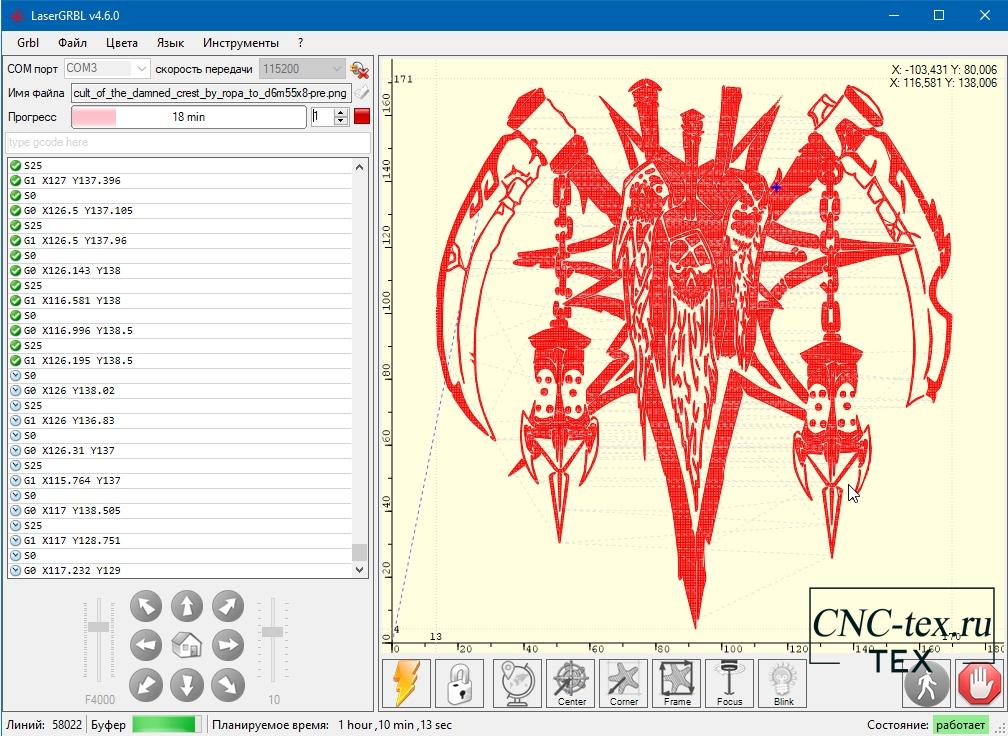
Давайте нарисуем красного венома. Скачиваем картинку.
Добавляем в программу LaserGRBL.
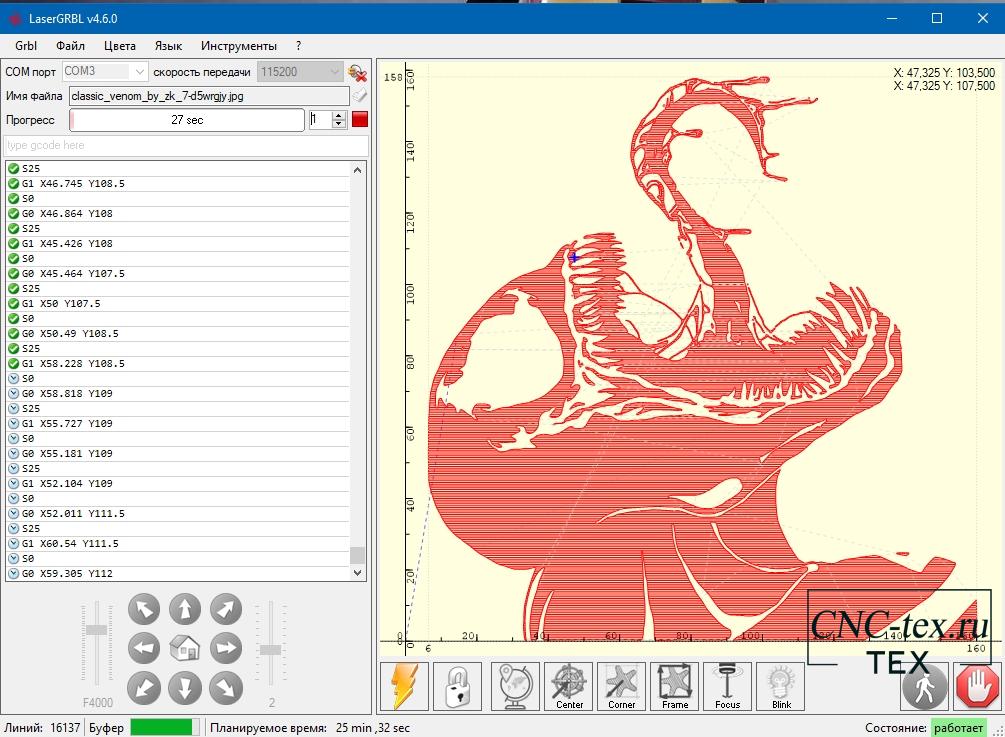
На выходе плоттера 4xiDraw получаем вот такое изображение.
Какие проблемы у меня возникли при работе с Arduino плоттером 4xiDraw.
При нанесении рисунка с помощью Arduino плоттера 4xiDraw использую бесплатное программное обеспечение, поэтому не обошлось без некоторых проблем:
- В связи с тем, что кинематика данного плоттера в прошивке GRBL выставляем CoreXY. А внешне она похожа больше на H-Bot. Но суть не в этом. Дело в том, что при перемещении в любую сторону участвуют оба двигателя. И настроить движение в правильном направлении достаточно сложно. Например, у меня зеркалит изображения по вертикальной оси. И пока не могу найти решение данной проблеме.
- Механизм поднятия и отпускания инструмента нанесения рисунка не имеет пружины. А также перемещение осуществляется зубчатым колесом. Что приводит к тому, что ручка местами рисует тоньше, а местами толще. Причем влияет на качество даже небольшой изгиб бумаги. Поэтому я использую пружинку, чтобы сделать небольшое хождение стержня. Что приводит к более равномерному нанесению линий. Мой ЧПУ плоттер из карандашей оснащён похожим механизмом. И при этом проблем не было.
- Наклон инструмента нанесения рисунка это хорошо. Но в сочетании с тем, что он не подпружинен, привел к тому, что я сломал капиллярную ручку. Буду думать, как исправить данную ситуацию. Капиллярной ручкой рисовать гораздо лучше как показываем использование моем плоттере в виде принтера.
Буду настраивать и дорабатывать плоттер, поэтому не забывайте добавить сайт в закладки, чтобы не потерять и не пропустить интересную и полезную информацию.
Понравился проект ЧПУ плоттер на Arduino необходимые программы? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
| Рисунки для ЧПУ плоттера из статьи.zip | 2284 Kb | 1741 | Скачать | |
| Конфигурационный файл ЧПУ плоттере.nc | 1 Kb | 1556 | Скачать | |
| Настроенная прошивка grbl для данного станка с чпу.zip | 169 Kb | 1671 | Скачать |